QUASAR
Quasi Autonomous SAiling Robot
Quasi Autonomous SAiling Robot
Il progetto QASAR (Quasi Autonomous Sailing Robot) si pone l’obiettivo di sviluppare tecnologie per la guida autonoma navale allo scopo di ridurre il rischio di incidenti causati dall’errore umano e di raccogliere informazioni utili sull’andamento della navigazione.
La finalità ultima del progetto è stata quindi la realizzazione di una imbarcazione prototipale a guida autonoma, che potrebbe essere considerata il “prototipo” dell’intero progetto. Nella realtà, la realizzazione del prototipo finale è passata attraverso la realizzazione dei prototipi di tutti i sottosistemi che ne fanno parte. Di seguito verranno sinteticamente descritti i sistemi principali, le cui caratteristiche di dettaglio sono riportate nella Relazione Tecnica generale.
Computer di Bordo
Rappresenta il cuore del sistema in quanto elemento di supervisione dell’intero sistema di guida.
Controllo Timoneria
Il sottosistema di Controllo Timoneria è responsabile della regolazione dell’angolo di virata durante la navigazione con il sistema di guida autonoma. Questo riceve i comandi di virata dal computer di bordo, attua tali comandi pilotando un motore in corrente continua accoppiato alla timoneria e restituisce informazioni sull’esito delle manovre. Il prototipo realizzato è quindi costituito da una sezione di attuazione che si occupa di trasferire al gruppo timone i corretti comandi attuativi e da un controllo elettronico a monte dello stesso. Il controllo elettronico gestisce i comandi di rotazione del motore accoppiato alla pompa secondaria.
Controllo Manetta
Il sottosistema Controllo Manetta è responsabile della regolazione della velocità, in fase di accelerazione e decelerazione, durante la guida autonoma. Ciò avviene con l’ausilio di motore che interviene meccanicamente sulla manetta ed un sistema di controllo che gestisce le regolazioni. Anche in questo caso, il sistema è costituito da una sezione di attuazione dei comandi ed una di gestione dei segnali di controllo degli stessi. Individuazione ostacoli tramite immagini Il sottosistema di individuazione ostacoli tramite immagini consiste in quattro videocamere disposte sul perimetro dell’imbarcazione con lo scopo di osservare l’orizzonte. Tali riprese vengono successivamente elaborate in tempo reale durante la guida autonoma per riconoscere possibili ostacoli da notificare all’utente e da inviare al Computer di bordo che, qualora fosse necessario, rielaborerebbe la rotta al fine di evitare possibili collisioni.
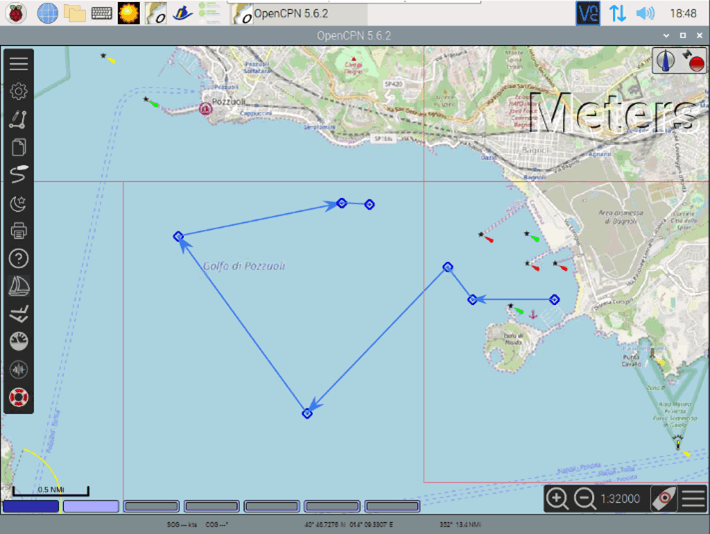
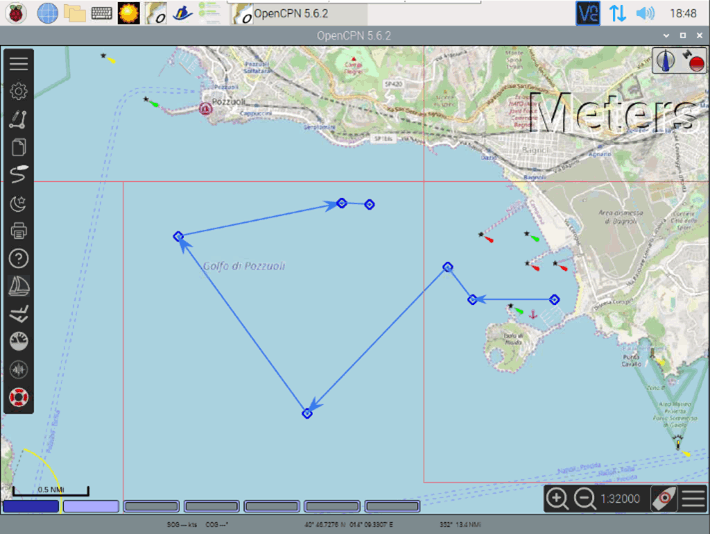
Prototipo completo
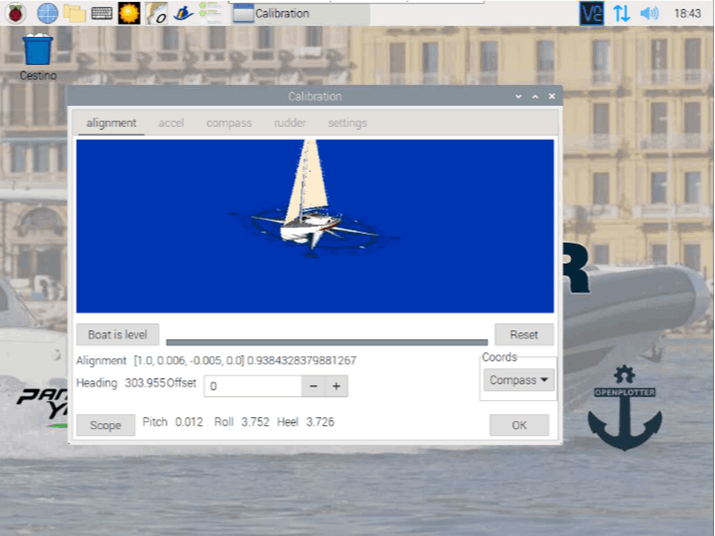
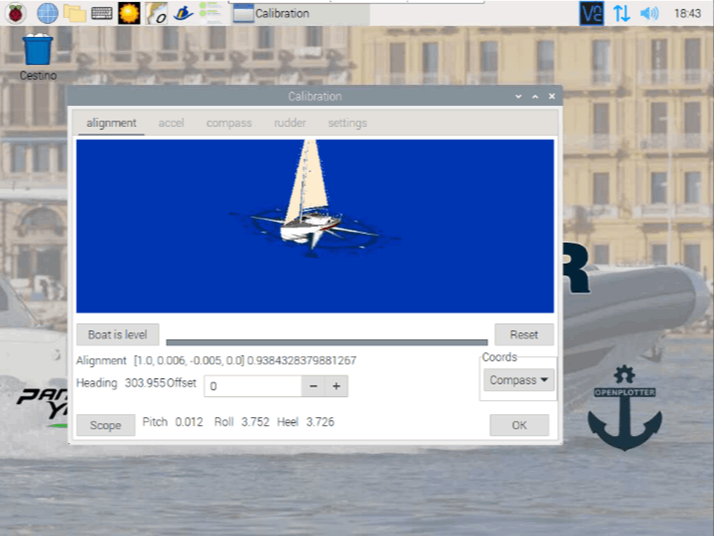
I sottosistemi sviluppati sono stati quindi integrati sull’imbarcazione di riferimento, con gli opportuni tuning in fase di installazione, dando quindi origine al prototipo complessivo di progetto. Di seguito qualche immagine e lo schema di installazione esecutivo dei sottosistemi.
Come piattaforma di assistenza alla navigazione, finalizzato all’acquisizione dati sull’assetto e sulle condizioni di navigazione dell’imbarcazione, è stato progettato un sistema modulare di schede elettroniche basate sul microcontrollore STM32F407 di ST Microelectronics, battezzato MV5. Le schede elettroniche di questo sistema possono essere impilate a seconda delle necessità tramite connettori Amphenol board-to-board, rendendo il sistema altamente versatile.